John Abanes
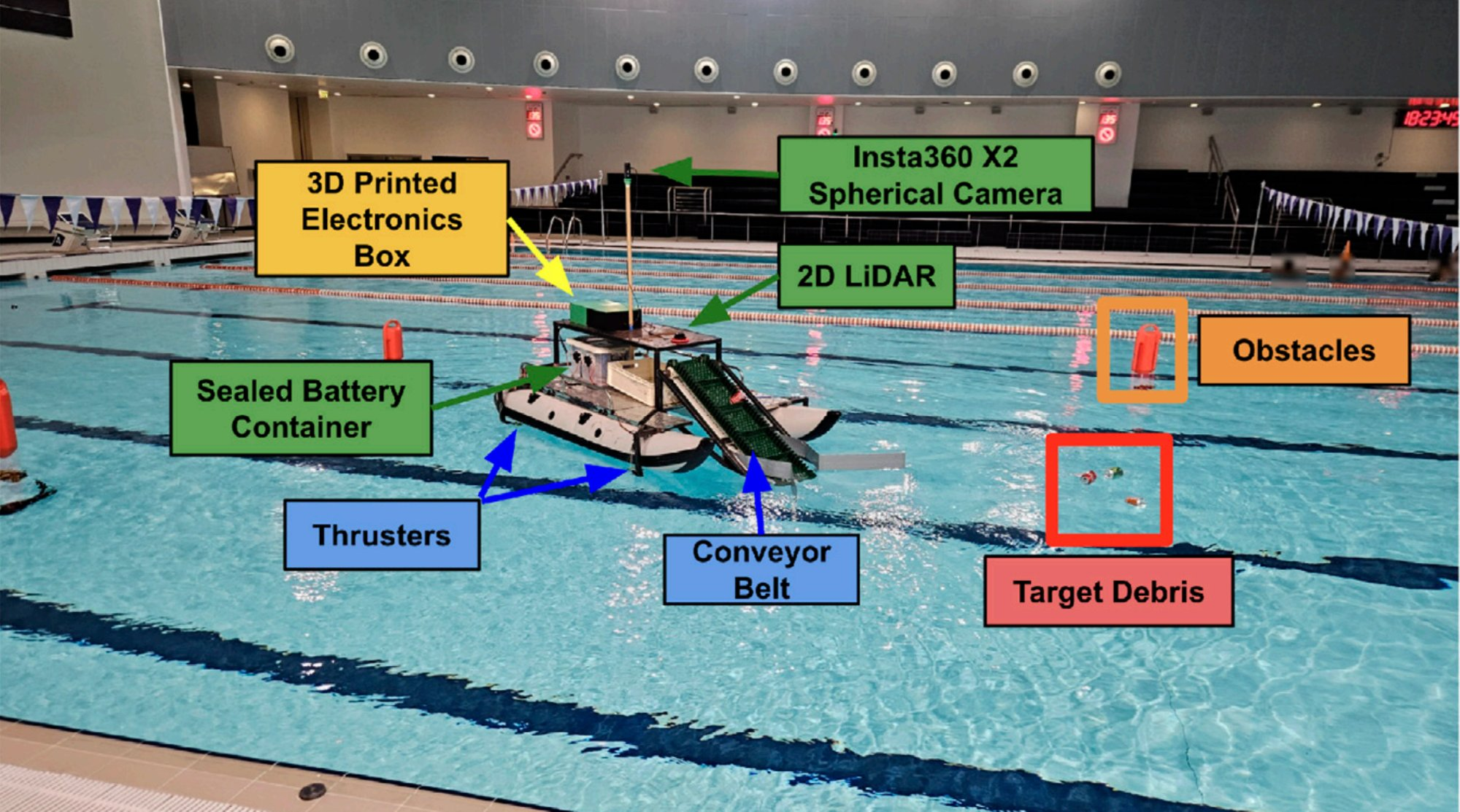
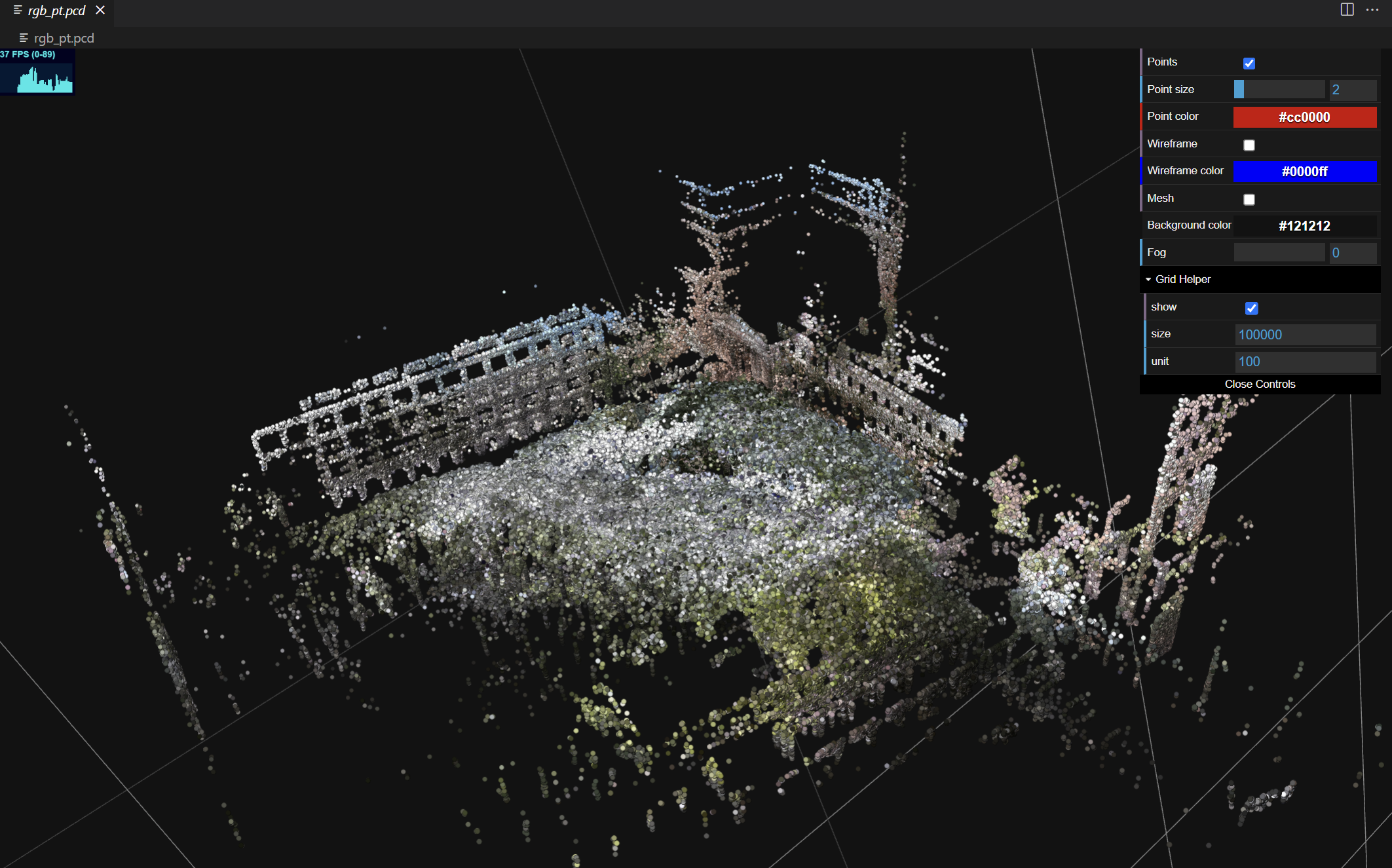
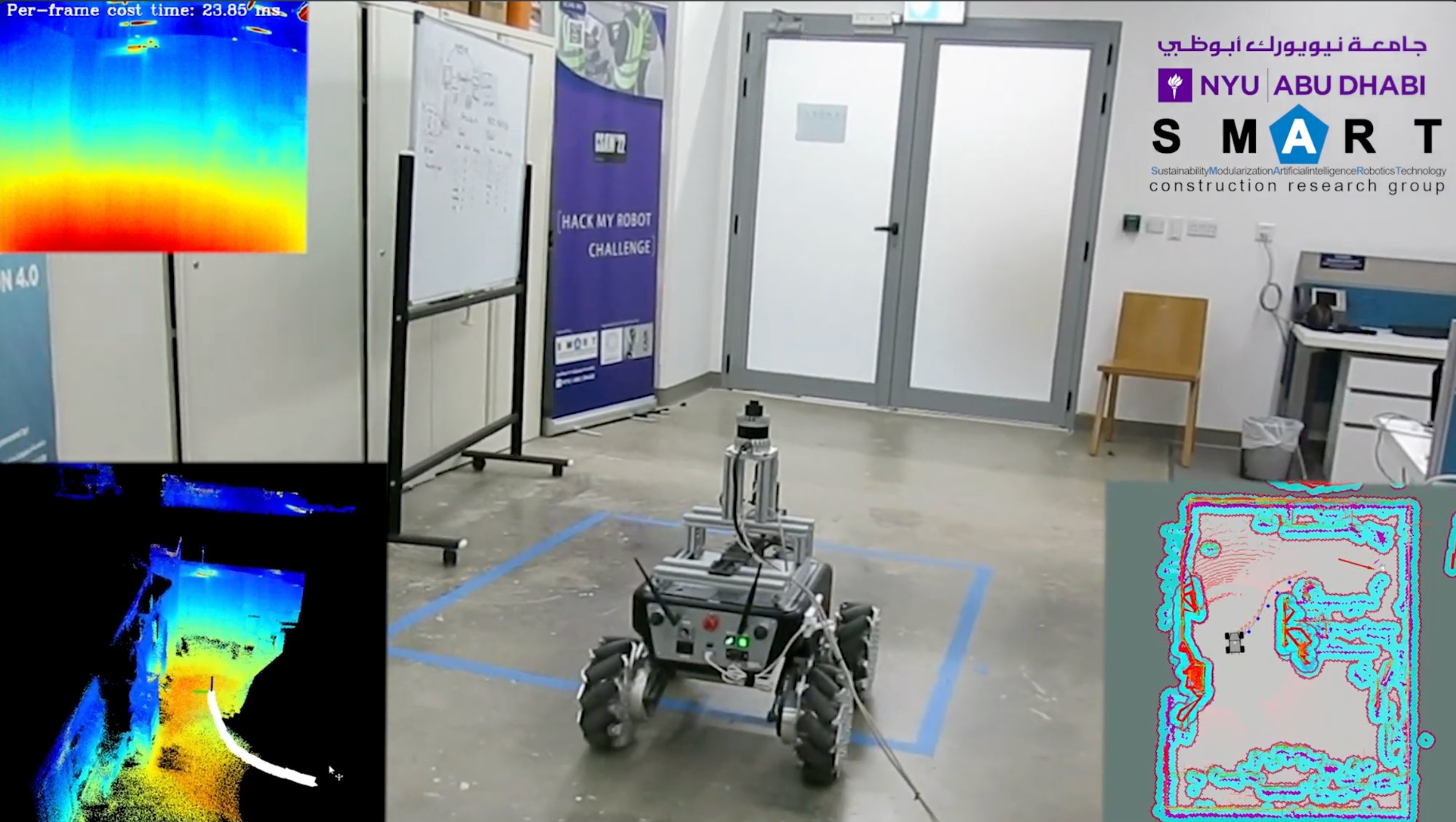
PhD Student in Electrical Engineering at NYU Tandon. Building robots that navigate, map, and clean up the world — from thermal point clouds to ocean trash retrieval.
4
Publications
34
Citations
198
GitHub Stars